



掘进机无人驾驶系统RUDS(Roadheader Unmanned Driving System)系统描述系统实时采集各液压油缸的流量传感器、压力传感器等数据,通过AI算法,对液压油缸伸缩量进行精确控制;控制掘进机机身、锚杆平台等处于水平或预设姿态。对截割部截割巷道运行煤矸识别算法,调整截割面平齐度,控制截割速度,保证截割部按照预定截面进行截割;利用截割反馈信息,对巷道围岩状况进行判断,沿煤层起伏控制掘进机沿坡度截割。现场痛点1.工人置身于现场恶劣的环境中进行近距离观察判断,存在安全风险并对……

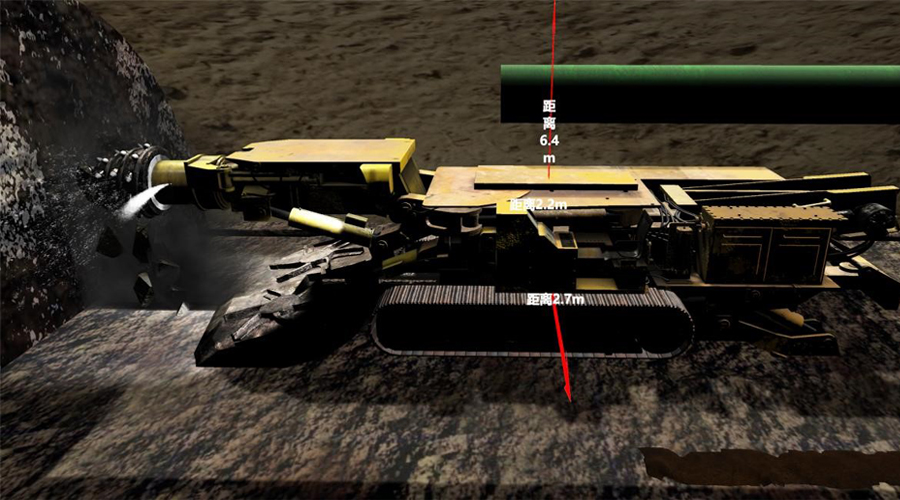
掘进工作面数字孪生系统HDTS (Heading Face Digital Twin System)系统描述系统通过从掘进工作面现场、各类设备及配套传感器获取基础设计数据和实时驱动数据,利用数字孪生技术进行建模和分析处理,构建与现场同步的数字孪生体,可在系统界面以三维动画方式实时展示掘进工作面各类设备位姿及工作状态,并可与掘进机控制系统联动,在遇到恶劣地质条件或设备异常工作的情况时,可在上位机及时进行预警并调控。系统可广泛应用于掘进机、掘锚机、连采机等掘进场景。现场痛点1.掘进工作面粉尘浓度……
掘进机惯导纠偏系统RINR(Roadheader Inertial Navigation Rectification System)系统描述系统在原有设备上加装激光雷达、高精度惯导等传感器对掘进机的姿态和行程进行监测。利用基于RoS平台的SLAM算法等无人驾驶技术,实现掘进机的定姿、定位,并与掘进机控制系统联动,具备定姿、中线自动校准等功能。系统实时解算出实际的掘进曲线并实时指导纠偏。可广泛应用于掘进机、掘锚机、连采机等掘进场景。现场痛点1.全站仪+惯导的掘进机定位方式,每掘进100米,需要……

北京龙田华远科技有限公司
煤矿智能化领导者关注我们

